


Động cơ bước/Step Motor là lựa chọn lý tưởng cho các hệ thống điều khiển vị trí chính xác như máy in 3D, máy CNC, thiết bị y tế và robot. Trong bài viết này, Bảo An sẽ cùng bạn tìm hiểu Step Motor là gì, nguyên lý hoạt động, phân loại, ưu nhược điểm và hướng dẫn cách lựa chọn phù hợp cho từng ứng dụng kỹ thuật cụ thể.

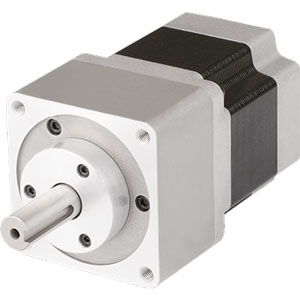
Động cơ bước(stepper motor) là một loại động cơ điện hoạt động theo nguyên lý phân chia chuyển động quay thành từng bước góc xác định. Không giống như động cơ DC thông thường quay liên tục, Step Motor quay theo từng “bước” rời rạc, mỗi bước thường có góc 1.8°, 0.9° hoặc nhỏ hơn nếu dùng vi bước (microstepping).
Chính đặc điểm định vị chính xác mà không cần hồi tiếp này giúp Step Motor trở thành lựa chọn phổ biến trong các hệ thống điều khiển chính xác, từ in 3D đến robot công nghiệp.
Việc lựa chọn đúng Step Motor không chỉ dừng lại ở công suất hay kích thước. Bạn cần xem xét toàn diện các yếu tố kỹ thuật sau:
Tải trọng càng lớn, động cơ cần có mô-men xoắn đầu trục (torque) càng cao.
Hãy tính toán tải theo công thức:
Torque (Nm) = Force (N) × Distance (m) ÷ Efficiency
Trong đó:
Force là lực cần truyền
Distance là bán kính hoặc bán kính puly
Efficiency là hiệu suất truyền động (thường từ 0.7 đến 0.9)
Ví dụ: Với trục vít me, hãy xem xét hệ số ma sát, tải trọng cần nâng và tỷ số truyền.
Mô-men giữ (holding torque) là yếu tố chính khi chọn motor bước – nên chọn dư khoảng 30% so với tải thực tế để tránh mất bước.
Nếu ứng dụng cần tốc độ cao (trên 1000 RPM), nên cân nhắc thay bằng servo motor.
Để tối ưu tốc độ:
Dùng nguồn điện áp cao hơn (nhưng không vượt mức driver cho phép)
Dùng driver hỗ trợ microstepping để mượt hơn khi tăng tốc
Góc bước càng nhỏ → độ chính xác càng cao.
Góc bước thường gặp:
1.8° → 200 bước/vòng (phổ biến)
0.9° → 400 bước/vòng (độ chính xác cao)
Dùng driver hỗ trợ microstep có thể nâng độ phân giải lên tới 1600–25600 bước/vòng.
Ví dụ: In 3D và CNC yêu cầu độ phân giải cao → ưu tiên motor 0.9° + driver microstep.
Step Motor được mã hóa theo chuẩn NEMA (National Electrical Manufacturers Association):
NEMA 17: 42x42 mm – nhỏ gọn, phổ biến cho máy in 3D
NEMA 23: 57x57 mm – thông dụng trong máy CNC mini, robot
NEMA 34: 86x86 mm – cho tải nặng hơn
Lưu ý: Kích thước lớn hơn không đồng nghĩa công suất cao hơn, vẫn phải xem torque danh định.
Kiểm tra:
Loại tín hiệu điều khiển: step/direction, UART, CAN...
Điện áp và dòng ra: driver phải cấp đủ cho motor (ví dụ 24V 3A).
Khả năng microstepping: càng mịn thì càng êm và chính xác.
Một số driver phổ biến:
A4988, DRV8825 (cho tải nhẹ)
TB6600, DM542 (cho tải trung bình)
Leadshine (chuyên nghiệp, công nghiệp)
Nhiệt độ: Động cơ phải chịu được nhiệt trong môi trường nóng ẩm.
Bụi và rung: Nếu làm việc trong nhà xưởng có bụi, nên chọn động cơ có IP55 trở lên, hoặc thêm hộp bảo vệ.
Tiếng ồn: Microstepping giúp giảm tiếng kêu đặc trưng của stepper.
Chiều dài trục motor có đủ để gắn puly, bánh răng?
Có cần feedback encoder để đóng vòng lặp không?
Kích thước motor có vừa với cơ cấu thiết kế không (housing, gá đỡ...)?
Tránh quá tải để không mất bước
Chọn nguồn cấp phù hợp với điện áp và dòng định mức
Sử dụng microstepping driver để giảm rung và tăng độ phân giải
Theo dõi nhiệt độ động cơ nếu chạy liên tục để tránh quá nhiệt
Tổng kết: Step Motor là giải pháp tuyệt vời cho những ứng dụng điều khiển chính xác trong môi trường không đòi hỏi hồi tiếp. Với giá thành hợp lý, dễ lắp đặt và khả năng kiểm soát góc quay chính xác, Step Motor vẫn giữ vai trò quan trọng trong các thiết kế cơ điện tử hiện đại. Kỹ sư, sinh viên hay nhà phát triển sản phẩm đều có thể tận dụng loại động cơ này để thiết kế các hệ thống điều khiển chính xác, đơn giản và tiết kiệm.
Step motor (hay còn gọi là động cơ bước) là loại động cơ điện quay theo từng góc bước cố định, thay vì quay liên tục như động cơ DC. Mỗi bước quay tương ứng với một tín hiệu điều khiển từ driver, giúp định vị chính xác vị trí trục mà không cần hồi tiếp. Step motor rất phù hợp với các ứng dụng cần điều khiển vị trí như máy in 3D, máy CNC hoặc thiết bị y tế.
Motor bước là tên gọi khác của step motor trong tiếng Việt. Đây là loại động cơ cho phép quay từng bước nhỏ, có độ phân giải cao và điều khiển được bằng tín hiệu điện. Motor bước thường được sử dụng trong các hệ thống tự động hóa yêu cầu độ chính xác như robot, camera quay quét, máy đóng gói hoặc thiết bị đo lường.
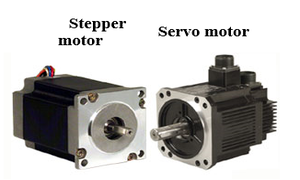
Step motor hoạt động theo nguyên lý open-loop (mở), không cần cảm biến hồi tiếp, trong khi servo motor sử dụng encoder để điều khiển theo vòng lặp khép kín (closed-loop). Step motor dễ sử dụng, giá rẻ hơn và đủ chính xác cho nhiều ứng dụng tầm trung. Servo phù hợp hơn cho ứng dụng yêu cầu mô-men xoắn cao và phản hồi nhanh.
Có. Step motor bắt buộc phải sử dụng driver để điều khiển thứ tự và thời gian kích hoạt các cuộn dây. Driver nhận tín hiệu từ vi điều khiển (như Arduino, PLC...) và tạo ra tín hiệu điện tương ứng để motor bước quay chính xác theo yêu cầu.
Step motor được sử dụng rộng rãi trong:
Máy in 3D và máy in tem
Máy CNC mini và máy khắc laser
Camera điều khiển góc xoay
Băng tải nhỏ, cánh tay robot
Thiết bị y tế như máy bơm định lượng













 30102023030106.jpg)
